🚀 들어가며

cFS와 지상국이 통신할 수 있도록 하는 시스템이 cFS-GroundSystem 외에도 더 있는데, 가장 대표적인 것이 OpenC3의 COSMOS 소프트웨어이다.
COSMOS 공식 문서에서 cFS Integration 가이드를 제공하는데다, 최신 브랜치를 보니 COSMOS를 공식 cFS Tool로 포함하려는 움직임이 보이고 있어 함께 다뤄보려 한다.
참고자료
- COSMOS Getting Started ― Installation (클릭)
- COSMOS Guides ― COSMOS and NASA cFS (클릭)
- Github ― nasa/cfs-cosmos-plugin (클릭)
🪐 COSMOS 설치
COSMOS 실습 또한 이전 cFS와 마찬가지로 WSL 환경에서 진행할 텐데, 먼저 Docker 및 Docker Compose가 미리 설치되어 있어야 한다. 도커 설치 관련해서는 다음 링크를 참고하면 된다.
리눅스의 경우 Docker Desktop은 설치하지 말라고 명시되어 있으니 주의해야 한다.
Github에서 클론해오기
원하는 위치에 COSMOS Repo를 클론한다. 이때 안정성을 위해서 특정 태그로 체크아웃해 진행하는 것을 권장한다.
git clone https://github.com/OpenC3/cosmos-project.git
cd cosmos-project
git checkout v7.0.0
compose.yaml 포트 설정
COSMOS를 도커 위에서 실행하려면 openc3.sh shell script를 start 옵션과 함께 돌려주면 된다. 그런데 우리는 cFS와 결합해서 사용할 것이기 때문에, 약간 더 설정이 필요하다.
cFS 텔레메트리 구독을 위해 UDP 포트를 열어준다. compose.yaml 파일의 openc3-operator 필드에 포트 바인딩을 추가하면 된다.
cd cosmos-project
vi compose.yaml특별히 NASA 공식 플러그인은 cFS를 두 개의 인스턴스(CFS-1, CFS-2) 로 운용하는 것을 전제로 한다. 각 인스턴스의 포트 구성은 다음과 같다. 우리는 TM 포트 두 개를 추가한다.
| 인스턴스 | TC 포트 (명령 수신) | TM 포트 (텔레메트리 송신) |
|---|---|---|
| CFS-1 | 1234/udp | 2234/udp |
| CFS-2 | 1235/udp | 2235/udp |
openc3-operator:
ports:
- "127.0.0.1:2234:2234/udp"
- "127.0.0.1:2235:2235/udp"
🎆 COSMOS 실행
변경된 사항을 포함해 컨테이너를 빌드하고 COSMOS를 실행한다.
./openc3.sh start
이후 http://localhost:2900/로 접속하면 다음과 같이 브라우저 내에서 대시보드 콘솔을 확인할 수 있다. 여기서 비밀번호를 설정해주면 된다.


그러면 이제 실제 패킷이 오고가는 걸 대시보드에서 확인할 수 있다. 🪄
도커 컨테이너 및 COSMOS 프로그램을 종료하고 싶다면 같은 셸 스크립트에 stop 인자를 주어 실행한다. stop 명령어는 컨테이너와 내부 데이터를 삭제하지 않으며, 언제나 다시 start으로 재개할 수 있다.
./openc3.sh stop # stop
./openc3.sh start # resume⛵ cFS를 Docker Container로서 실행하기
이전 포스트를 실습했다면 클론해놓은 cFS 디렉토리에서 그대로 진행하면 되고, 실습하지 않았다면 상위 디렉토리로 가서 cFS를 불러온다.
cfs-cosmos-plugin은 cFS v7.0.1부터 포함되어 있기 때문에 해당 브랜치로 체크아웃하고 진행한다.
⚠️주의⚠️: 이전에 남아 있던 cFS를 사용한다면, build 디렉토리를 꼭 삭제해 주어야 한다.
cd ${cosmos-dir}/..
git clone https://github.com/nasa/cFS.git
cd cFS
git checkout v7.0.1
rm -rf build # Just to be sure이제 cFS 내부에 Dockerfile을 추가해 빌드 시 도커 컨테이너가 생성되게 한다.
vi Dockerfile내용은 다음과 같다.
FROM ubuntu:25.04 AS builder
ARG DEBIAN_FRONTEND=noninteractive
ARG SIMULATION=native
ENV SIMULATION=${SIMULATION}
ARG BUILDTYPE=debug
ENV BUILDTYPE=${BUILDTYPE}
ARG OMIT_DEPRECATED=true
ENV OMIT_DEPRECATED=${OMIT_DEPRECATED}
RUN \
apt-get update && \
apt-get -y upgrade && \
apt-get install -y build-essential git cmake && \
rm -rf /var/lib/apt/lists/*
WORKDIR /cFS
COPY . .
RUN git submodule init \
&& git submodule update
RUN make native_std.prep
RUN native_std.install
FROM ubuntu:25.04
COPY /cFS/build-native_std /cFS/build-native_std
WORKDIR /cFS/build-native_std/exe/cpu1
ENTRYPOINT [ "./core-cpu1" ]이제 도커 명령어를 실행해 cFS를 시작한다. 명령 수신 포트 1234, 1235를 바인딩해 주어야 한다.
docker build -t cfs .
docker run -d \
--cap-add CAP_SYS_RESOURCE \
--net=cosmos-project_default \
--name cfs-1 \
-p 1234:1234/udp \
cfs
docker run -d \
--cap-add CAP_SYS_RESOURCE \
--net=cosmos-project_default \
--name cfs-2 \
-p 1235:1235/udp \
cfs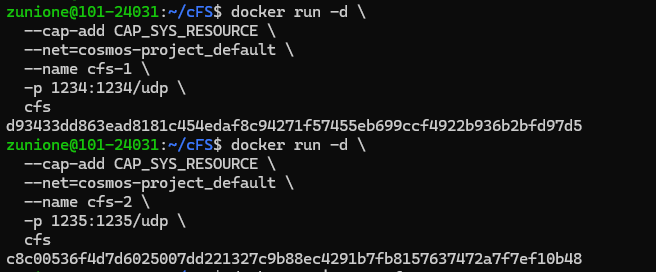
🔌 NASA cFS COSMOS 플러그인
호스트에 cFS 빌드 트리 준비
cfs-cosmos-plugin의 make gem은 호스트 파일시스템에서 cFS의 cmake 빌드 디렉토리를 찾는다.
앞서 Dockerfile로 빌드한 결과물은 도커 이미지 내부에만 존재하고 우리의 로컬 파일 시스템에는 반영되지 않으므로, 별도로 한 번 더 빌드를 거쳐야 한다.
cd ~/cFS
git checkout v7.0.1 # Just to be sure
git submodule init
git submodule update
make native_std.prep
make native_std.install 플러그인 빌드
파일 트리 생성이 완료되었다면 NASA cFS 팀이 공식 배포하는 플러그인 디렉토리에서 빌드한다.
openc3.sh 셸 스크립트는 PATH에 등록해도 되고, 아래 명령어처럼 경로를 명시적으로 알려주어도 된다. 빌드 버전은 자유롭게 지정할 수 있다.
cd cFS/tools/cfs-cosmos-plugin
~/cosmos-project/openc3.sh cli rake build VERSION=1.0.0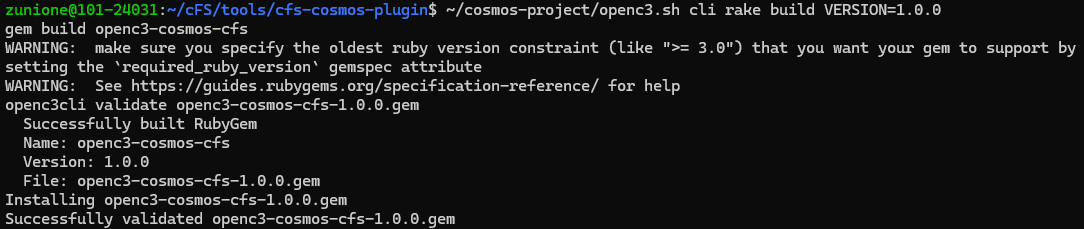
빌드 완료 시 openc3-cosmos-cfs-1.0.0.gem 파일이 생성된다.
이 파일을 꼭 로컬로 다운받아 주어야 한다.
cp openc3-cosmos-cfs-1.0.0.gem /mnt/c/${your_dir}컨테이너 IP 확인
플러그인 설치 시 각 컨테이너의 IP 주소를 입력해야 한다. 아래 명령어로 확인한다.
docker network inspect cosmos-project_default출력 결과의 Containers 섹션에서 각 컨테이너의 IPv4Address를 메모한다. 예시는 다음과 같다.
"cfs-1": "172.18.0.10/16"
"cfs-2": "172.18.0.11/16"
"cosmos-project-openc3-operator-1": "172.18.0.9/16"플러그인 설치
이제 아까 다운받은 플러그인을 COSMOS에 설치할 차례이다.
브라우저에서 http://localhost:2900/tools/admin 으로 접속한다.
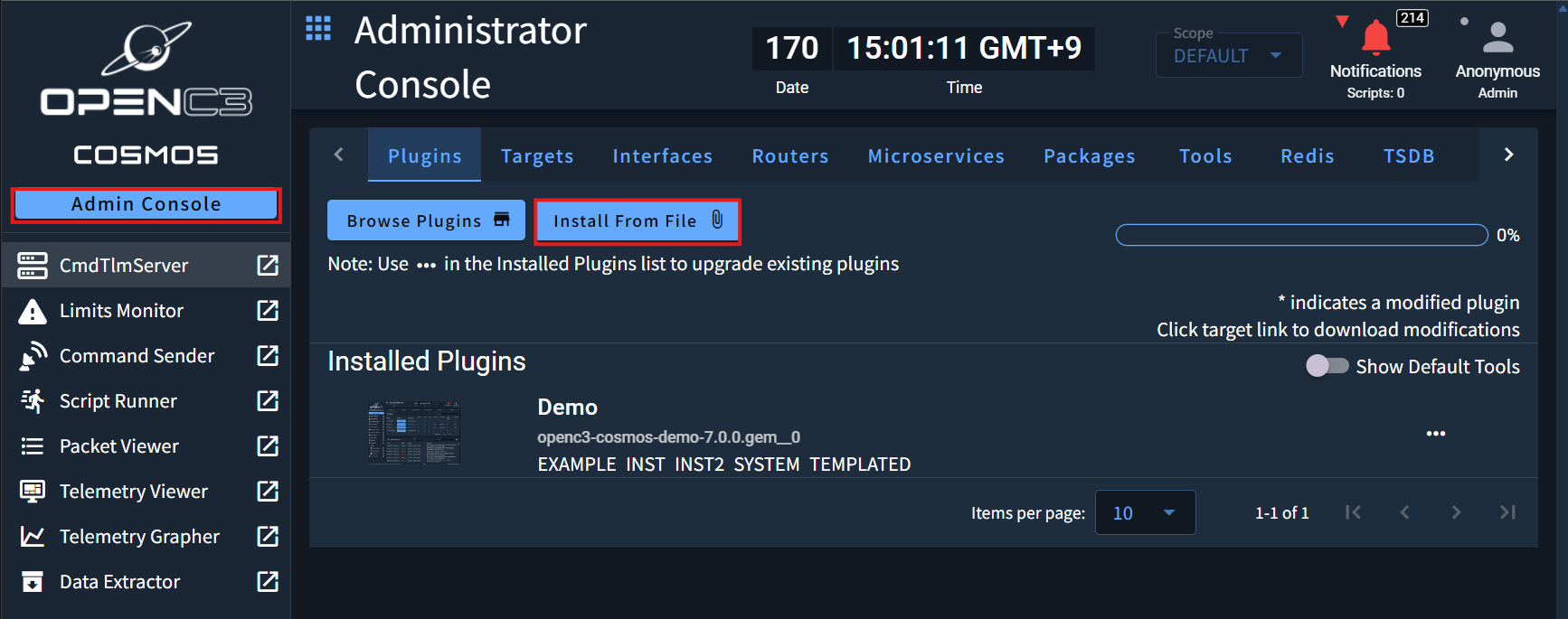
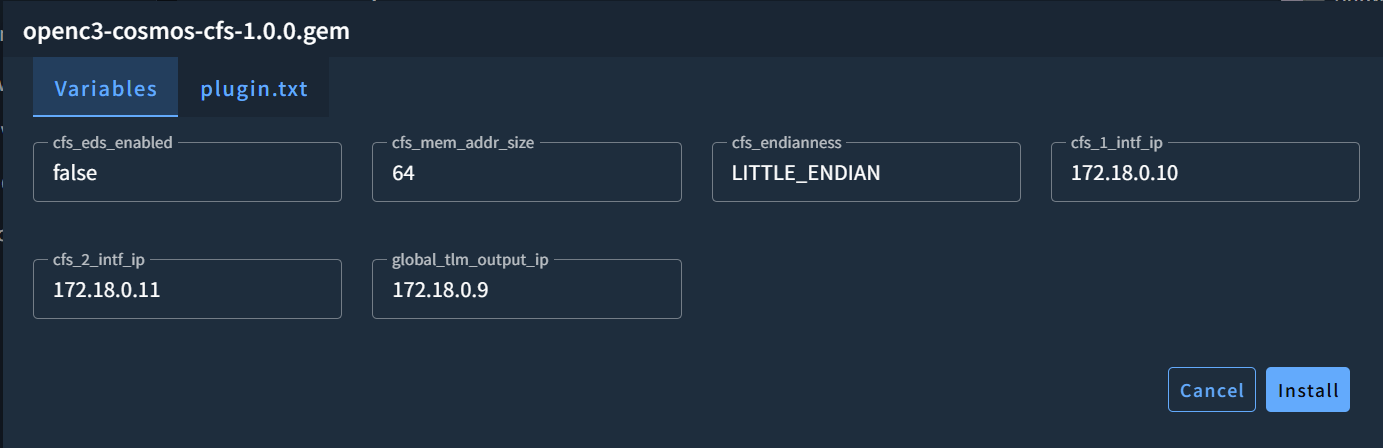
Administrator Console의 Plugins 탭에서 'Install Rrom File' 버튼을 클릭하고 다운받아 놓았던 .gem 파일을 선택한 뒤, 아래 파라미터를 상황에 맞게 입력하고 Install 버튼을 누른다.
| 파라미터 | 기본값 | 설명 |
|---|---|---|
cfs_mem_addr_size |
64 | 32비트 시스템이면 32로 변경 |
cfs_endianness |
LITTLE_ENDIAN |
빅엔디언 시스템이면 변경 |
cfs_1_intf_ip |
172.18.0.10 | 위에서 확인한 cfs-1 컨테이너 IP |
cfs_2_intf_ip |
172.18.0.11 | 위에서 확인한 cfs-2 컨테이너 IP |
global_tlm_output_ip |
172.18.0.9 | 위에서 확인한 openc3-operator 컨테이너 IP |

openc3-cosmos-cfs-1.0.0.gem Variables
📡 텔레메트리 활성화 및 확인
텔레메트리 활성화
플러그인을 설치해도 cFS는 곧바로 텔레메트리를 전송하지 않는다. TO_LAB 앱에 활성화 커맨드를 보내야 전송이 시작된다.
Command Sender(http://localhost:2900/tools/cmdsender)를 열고, Target을 CFS-1 또는 CFS-2로 선택한 뒤 TO_LAB_CMD_ENABLE_OUTPUT 커맨드를 전송한다.
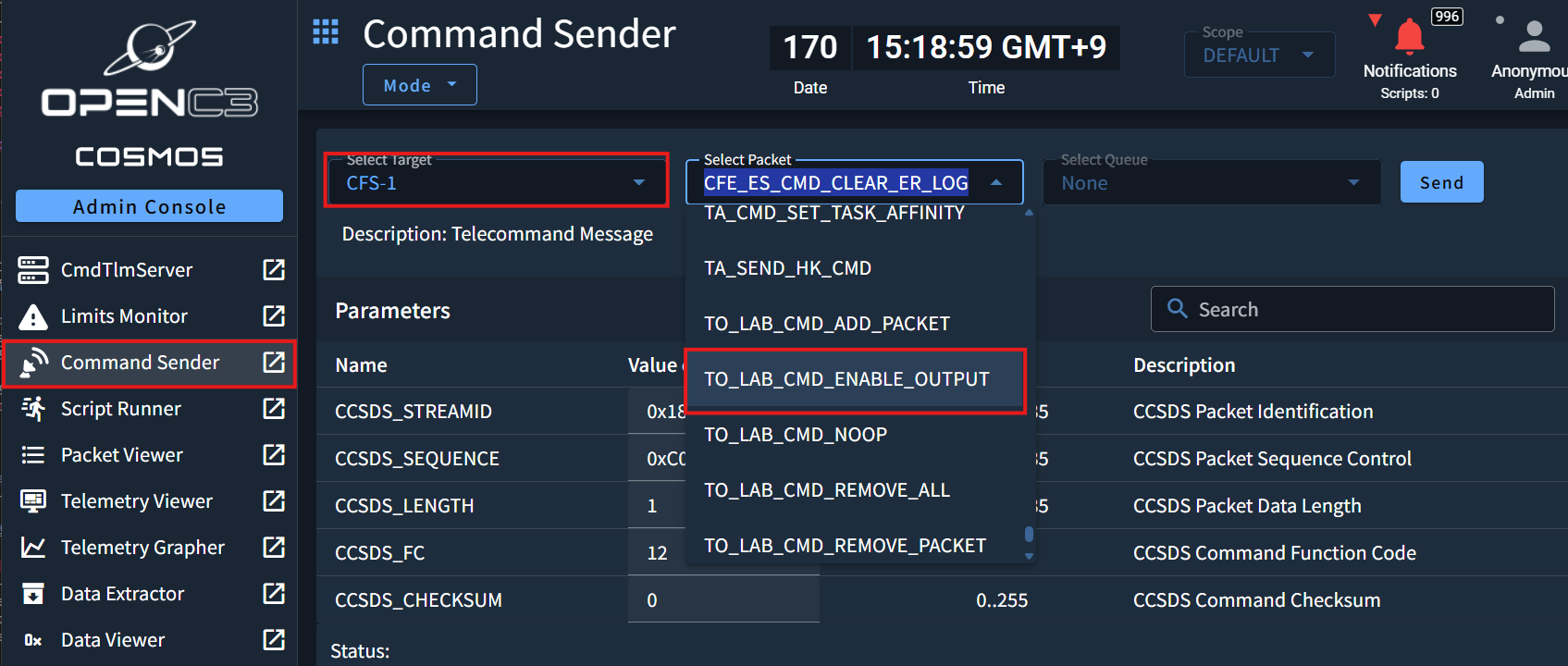
커맨드를 수신한 cFS 인스턴스는 global_tlm_output_ip로 지정된 COSMOS operator 컨테이너를 향해 텔레메트리 전송을 시작한다.
텔레메트리 확인
Telemetry Viewer를 열고, Target CFS_FLEET, Screen CFS_FLEET_OVERVIEW를 선택하면 CFS-1과 CFS-2의 Housekeeping 텔레메트리를 한 화면에서 함께 확인할 수 있다.
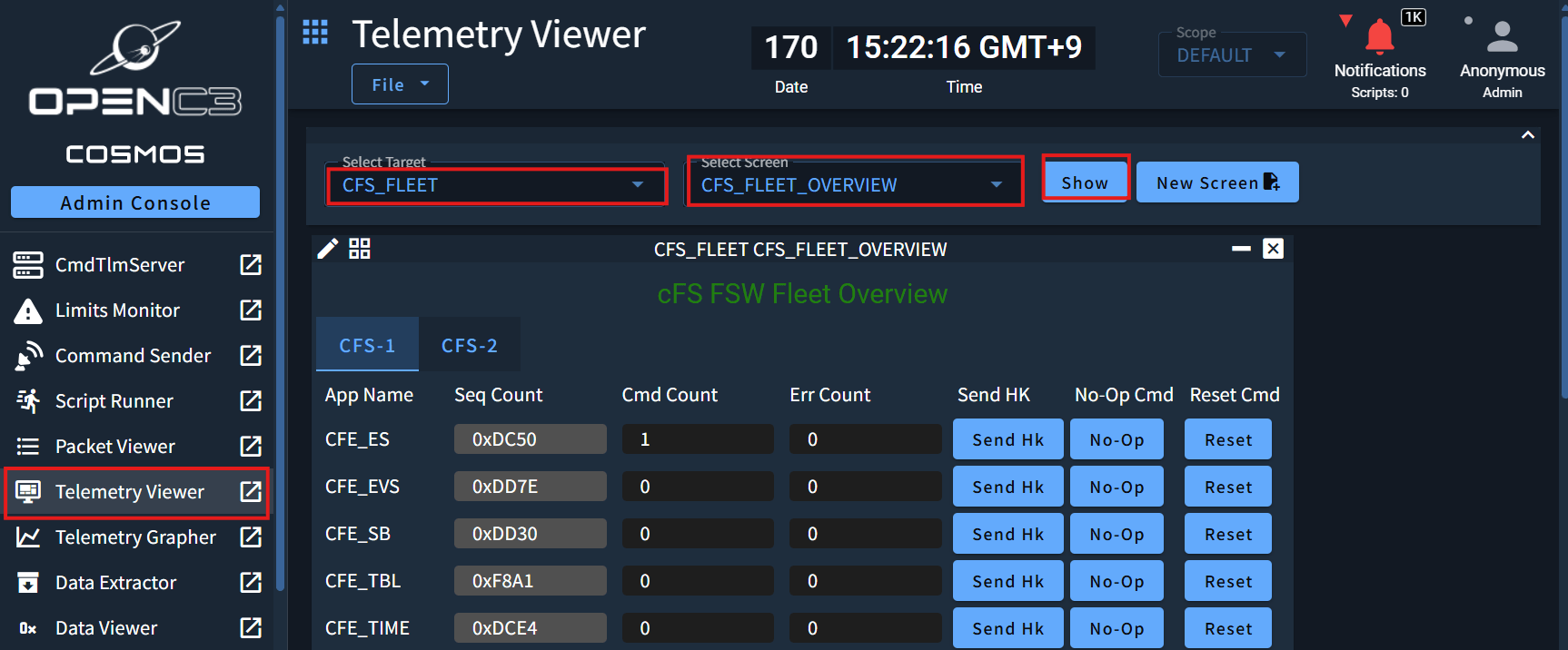
각 앱 우측의 버튼으로 간단한 커맨드 전송도 가능하다.
| 버튼 | 동작 |
|---|---|
| Send Hk | 새 Housekeeping 패킷 요청 |
| No-Op | NOOP 커맨드 전송 (Command Count 증가 확인용) |
| Reset | 카운터 초기화 |
✨ 마치며
NASA cFS 팀이 직접 제공하는 공식 COSMOS 플러그인을 활용하면, 플러그인을 처음부터 직접 작성하는 것보다 훨씬 완성도 높은 TM/TC 인터페이스를 빠르게 구성할 수 있다. 특히 두 인스턴스를 동시에 운용하는 CFS_FLEET 구성은 실제 위성 운용 시나리오를 실습하기에도 좋은 구성이다.
실습이 끝났다면 반드시 다음 명령어로 도커 컨테이너를 중단할 것을 권장한다.
docker stop cfs-1
docker stop cfs-2
./openc3.sh stop컨테이너 내에서 끊임없이 패킷을 수신하기 때문에 가상 디스크의 크기가 몇백 GB에 육박하게 늘어날 수 있다.
이 경우 컨테이너를 모두 내리고 디스크를 정리하고 압축해야 하는데, 그 과정이 번거롭기 때문에 미리 방지하는 것을 추천한다.